カテゴリー[ 昆虫| 田園| 街| 数学・幾何学| 寺院| 城| 祭り| 鉄道| 海| 風力発電]
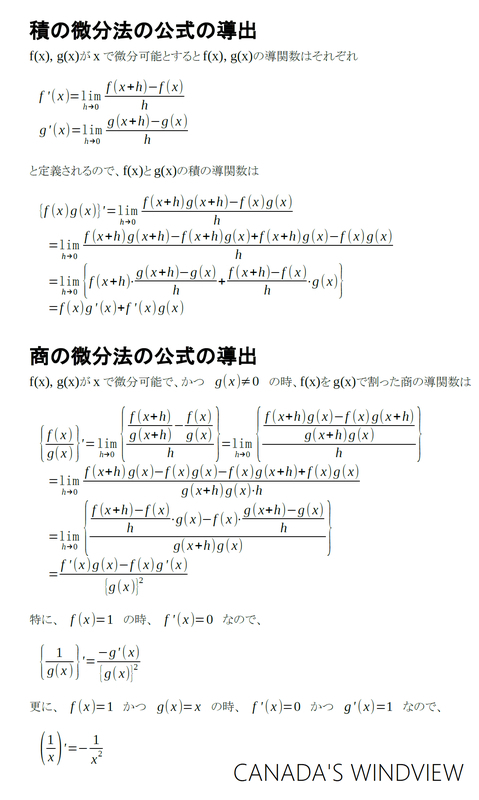


積の微分法の公式の導出
と定義されるので、と
の積の導関数は
商の微分法の公式の導出
特にの時、
なので、
更に、かつ
の時、
かつ
なので、
 の微分の公式の導出
の微分の公式の導出
ここでの時、
,
で成り立つ。
よってを満たす整数で
が成り立つ。
次に自然数に対して
が
で微分可能な場合、 商の微分法の公式を用いて、
となる。
更にと置くと、
となり、 これは
の
での微分が
<
の整数にも拡張できたことを意味する。
つまり、任意の整数に対して
が
で微分可能な場合、
が成り立つ。
合成関数の微分の公式の導出
2関数,
がある。 後式を前式に代入すると、
となる。 これを
と
の合成関数という。
ここでを
で微分することを考える。
まず、,
と置くと、
なら
。 また、
となる。
を
で微分すると、
LibreOffice 数式(Math) のソース:
alignl f ' ( x ) = { alignc lim from{ h toward 0 } { { f ( x + h ) - f ( x ) } over { h } } }
newline
alignl g ' ( x ) = { alignc lim from{ h toward 0 } { { g ( x + h ) - g ( x ) } over { h } } }
newline
alignl g ' ( x ) = { alignc lim from{ h toward 0 } { { g ( x + h ) - g ( x ) } over { h } } }
alignl lbrace f ( x ) g (x) rbrace ' = { alignc lim from{ h toward 0 } { { f ( x + h ) g ( x + h ) - f ( x ) g ( x ) } over { h } } }
newline
alignl phantom { y } = { alignc lim from{ h toward 0 } { { f ( x + h ) g ( x + h ) - f ( x + h ) g ( x ) + f ( x + h ) g ( x ) - f ( x ) g ( x ) } over { h } } }
newline
alignl phantom { y } = { alignc lim from { h toward 0 } left lbrace f ( x + h ) cdot { { g ( x + h ) - g ( x ) } over { h } } + { { f ( x + h ) - f ( x ) } over { h } } cdot g ( x ) right rbrace }
newline
alignl phantom { y } = f ( x ) g ' (x) + f ' ( x ) g (x)
newline
alignl phantom { y } = { alignc lim from{ h toward 0 } { { f ( x + h ) g ( x + h ) - f ( x + h ) g ( x ) + f ( x + h ) g ( x ) - f ( x ) g ( x ) } over { h } } }
newline
alignl phantom { y } = { alignc lim from { h toward 0 } left lbrace f ( x + h ) cdot { { g ( x + h ) - g ( x ) } over { h } } + { { f ( x + h ) - f ( x ) } over { h } } cdot g ( x ) right rbrace }
newline
alignl phantom { y } = f ( x ) g ' (x) + f ' ( x ) g (x)
left lbrace { f ( x ) } over { g ( x ) } right rbrace ' = { alignc lim from{ h toward 0 } { left lbrace { { f ( x + h ) } over { g ( x + h ) } - { f ( x ) } over { g ( x ) } } over { h } right rbrace } } = { alignc lim from{ h toward 0 } { left lbrace { { f ( x + h ) g ( x ) - f ( x ) g ( x + h ) } over { g ( x + h ) g ( x ) } } over { h } right rbrace } }
newline
alignl phantom { y } = { alignc lim from{ h toward 0 } { { f ( x + h ) g ( x ) - f ( x ) g ( x ) - f ( x ) g ( x + h ) + f ( x ) g ( x ) } over { g ( x + h ) g ( x ) cdot h } } }
newline
alignl phantom { y } = { alignc lim from{ h toward 0 } { left lbrace { { { f ( x + h ) - f ( x ) } over { h } } cdot g ( x ) - f ( x ) cdot { { g ( x + h ) - g ( x ) } over { h } } } over { g ( x + h ) g ( x ) } right rbrace } }
newline
alignl phantom { y } = { alignc { f ' ( x ) g ( x ) - f ( x ) g ' ( x ) } over { left lbrace g ( x ) right rbrace ^2 } }
newline
alignl phantom { y } = { alignc lim from{ h toward 0 } { { f ( x + h ) g ( x ) - f ( x ) g ( x ) - f ( x ) g ( x + h ) + f ( x ) g ( x ) } over { g ( x + h ) g ( x ) cdot h } } }
newline
alignl phantom { y } = { alignc lim from{ h toward 0 } { left lbrace { { { f ( x + h ) - f ( x ) } over { h } } cdot g ( x ) - f ( x ) cdot { { g ( x + h ) - g ( x ) } over { h } } } over { g ( x + h ) g ( x ) } right rbrace } }
newline
alignl phantom { y } = { alignc { f ' ( x ) g ( x ) - f ( x ) g ' ( x ) } over { left lbrace g ( x ) right rbrace ^2 } }
left lbrace { 1 } over { g ( x ) } right rbrace ' = { alignc { - f ( x ) g ' ( x ) } over { left lbrace g ( x ) right rbrace ^2 } }